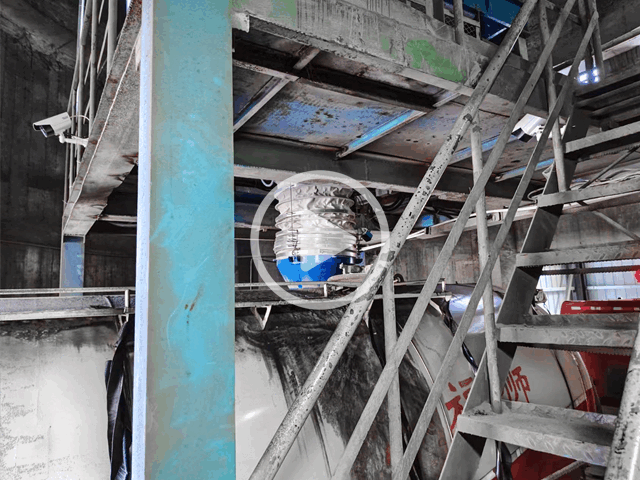
散裝機智能視覺定位系統
散裝機智能視覺定位系統它主要用以解決散料裝卸過程中散裝機和罐車對接難度高、對接效率低下、安全風險高的難題。它主要組成部分是機器視覺定位系統和智能運動控制系統,在罐車停靠之后,定位系統集成的高分辨率3D視覺相機開始工作,視覺服務器通過圖像識別技術快速捕捉并分析罐口的精確位置和形狀特征,計算出罐口在三維空間中的精確坐標,然后運動控制系統精確控制散裝機的移動方向和速度,平滑、迅速地移動到目標罐口上方,確認無誤后,PLC系列控制散裝機下落,散裝機和罐口對接完成。該系統能顯著減少司機的工作量,降低了對司機的技能要求,提高了裝卸效率,降低了安全風險。


? 機器視覺定位:
接受到業主方中控系統的定位指令后,定位系統集成的高分辨率攝像頭開始工作,視覺服務器通過圖像識別技術快速捕捉并分析罐口的精確位置和形狀特征,計算出罐口在三維空間中的精確坐標,然后將罐口坐標信息傳輸給PLC系統。
? 精準移動與對接:
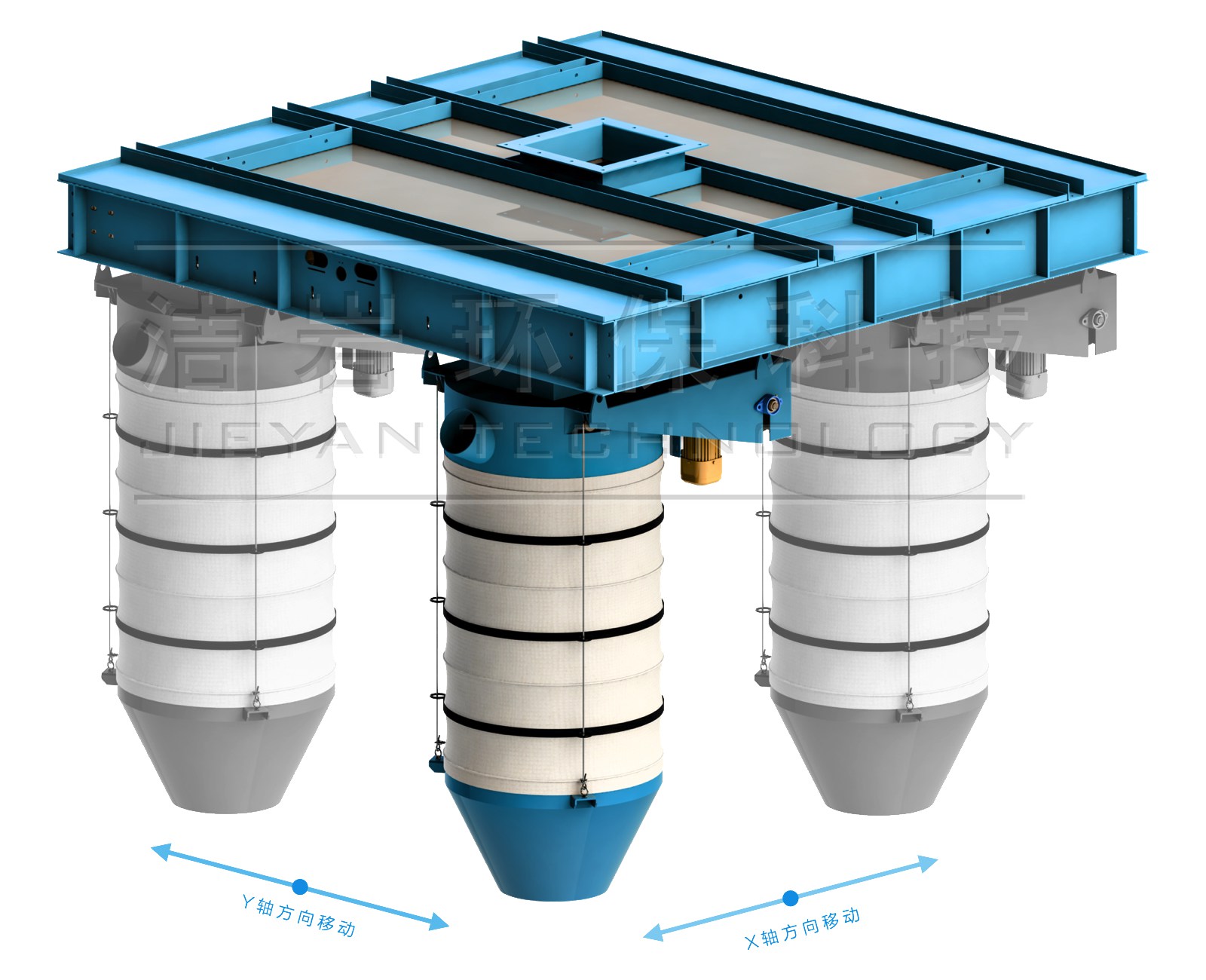
PLC系統通過對比現有散裝機位置信息,計算出散裝機需要行走的方向和距離,并控制前后(Y軸)左右(X軸)移動機構,精確控制整個機體的移動方向和速度,確保散裝機的下料口能夠平滑、迅速地移動到目標罐口上方;經過視覺系統再次計算罐口坐標,比對散裝機位置和罐口坐標,確認無誤后,PLC系列控制散裝機下落,對準罐口,保證定位誤差不超過±5mm;散裝機和罐口對接完成后,定位系統向業主中控系統反饋“就位完成”信號;業主中控系統可依據此信號采取相應的后續操作。
? 散裝機定位系統復位:
物料卸載完畢后,接受到業主中控系統的歸位指令后,PLC系統提升散裝機下料頭至上限位,移動散裝機至原點(前后左右均居中的位置),完成散裝機歸位后,向業主中控系統反饋“歸位完成”信息。
裝載定位精度高
無需司機多次移動車輛
提高車輛裝載效率
智能化程度高
可靠性高
操作簡便
高效節能
降低運行成本
提高作業安全性
易于維護和管理

? 對接難度高
依賴人工觀察和指揮來對準罐車與散裝機的接口,這要求極高的精準度和經驗。在視線不佳、天氣條件惡劣或夜間作業時,難度會大大增加。
? 對接效率低下
人工對接過程耗時較長,尤其是對于需要反復調整位置的情況,這直接影響到整體的裝貨效率和物 流周轉速度。
? 安全風險高
人工操作過程中,存在操作人員誤入危險區域或因溝通不暢導致的誤操作風險,增加了工作場所的 安全隱患。
? 存在人為判斷失誤
人為判斷可能出現失誤,比如對準不精確導致密封不嚴實,造成物料泄露或污染。

火 力 發 電
燃煤發電產生的粉煤灰從貯灰庫中自動裝載到罐車中,以便安全、環保地運輸至回收利用或處置地點。

建 材 水 泥
水泥廠使用干灰散裝機將水泥熟料或成品水泥裝入散裝運輸車,以供應給混凝土攪拌站或其他建筑工地,提高物流裝載效率。
化 工 行 業
化工廠處理各種化學粉末,如塑料樹脂、顏料、催化劑等,確保在裝運過程中減少粉塵污染和提高作業安全性。

糧 食 儲 運
燃煤發電產生的粉煤灰從貯灰庫中自動裝載到罐車中,以便安全、環保地運輸至回收利用或處置地點。

化 肥 散 裝
農業肥料如磷酸鈣粉、鉀肥粉的批量散裝運輸。

冶 金 行 業
用于裝運鐵粉、鋁粉等金屬粉末,支持冶金原料的高效轉運,尤其是在鋼鐵廠和有色金屬加工廠的原料輸出和副產品處理中。
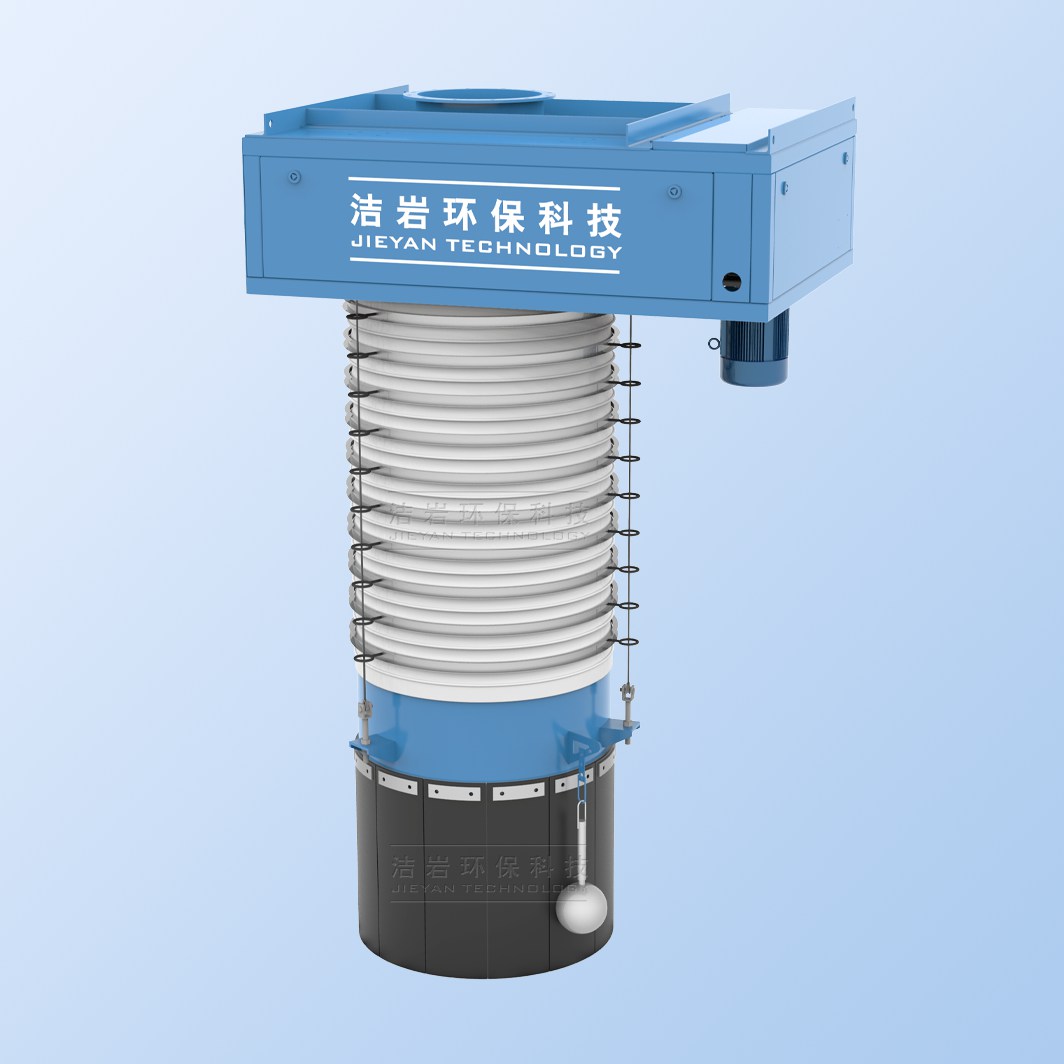
雙軸移動定位器
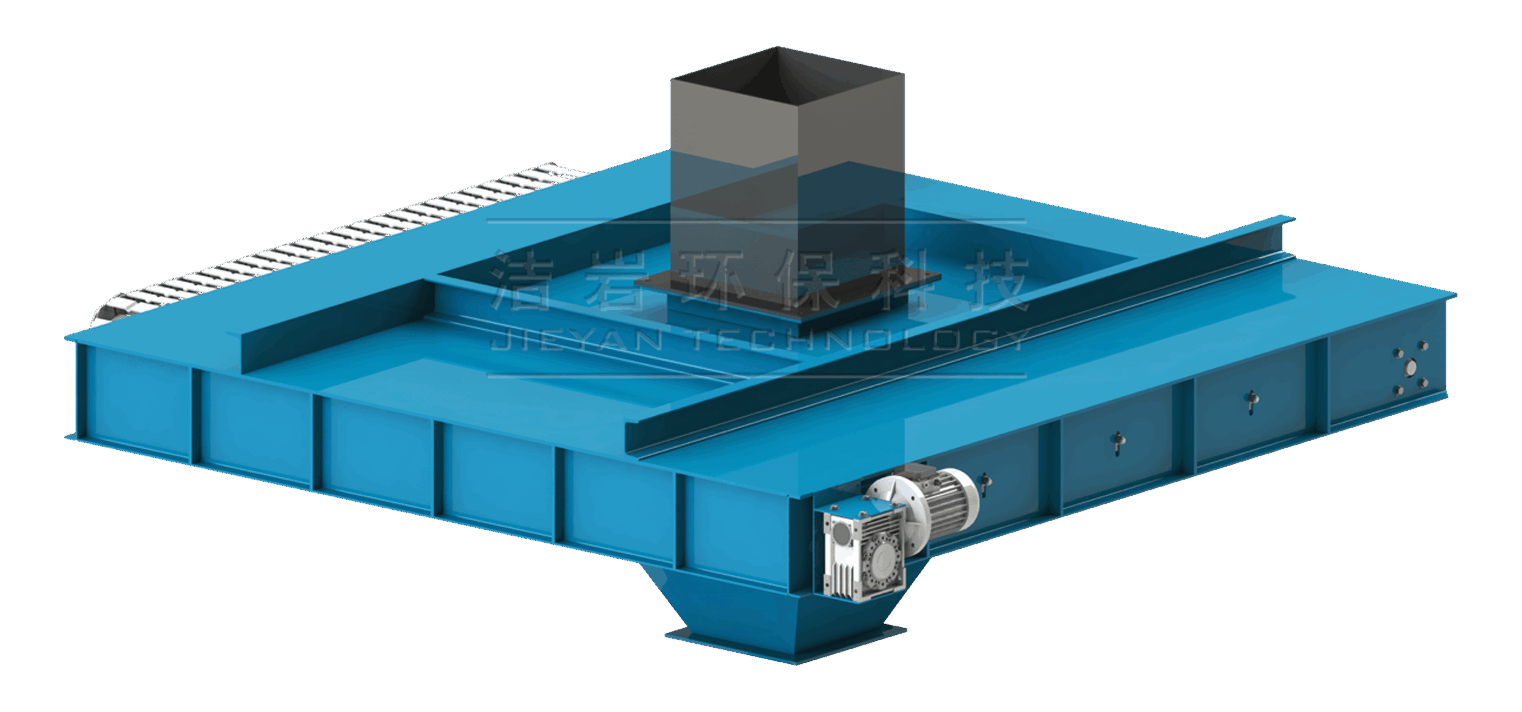
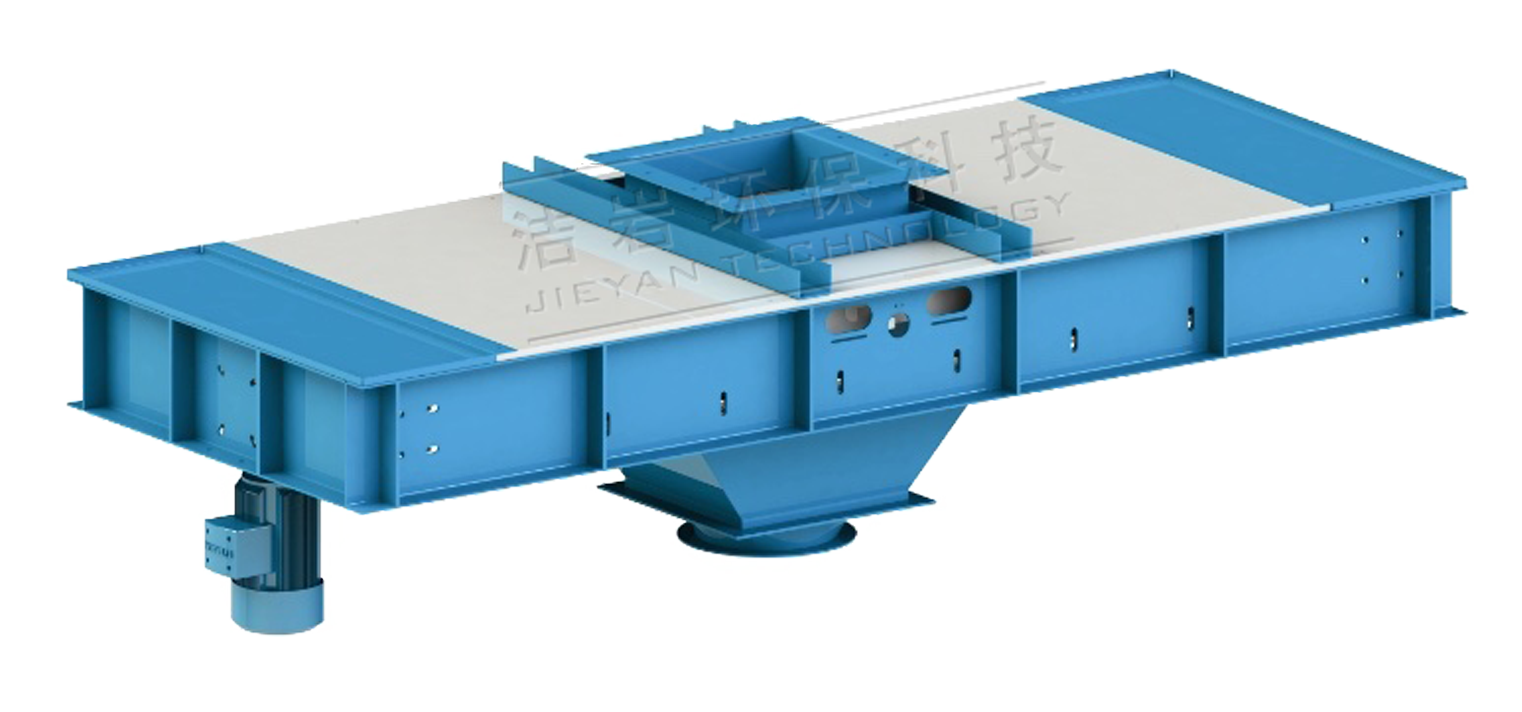
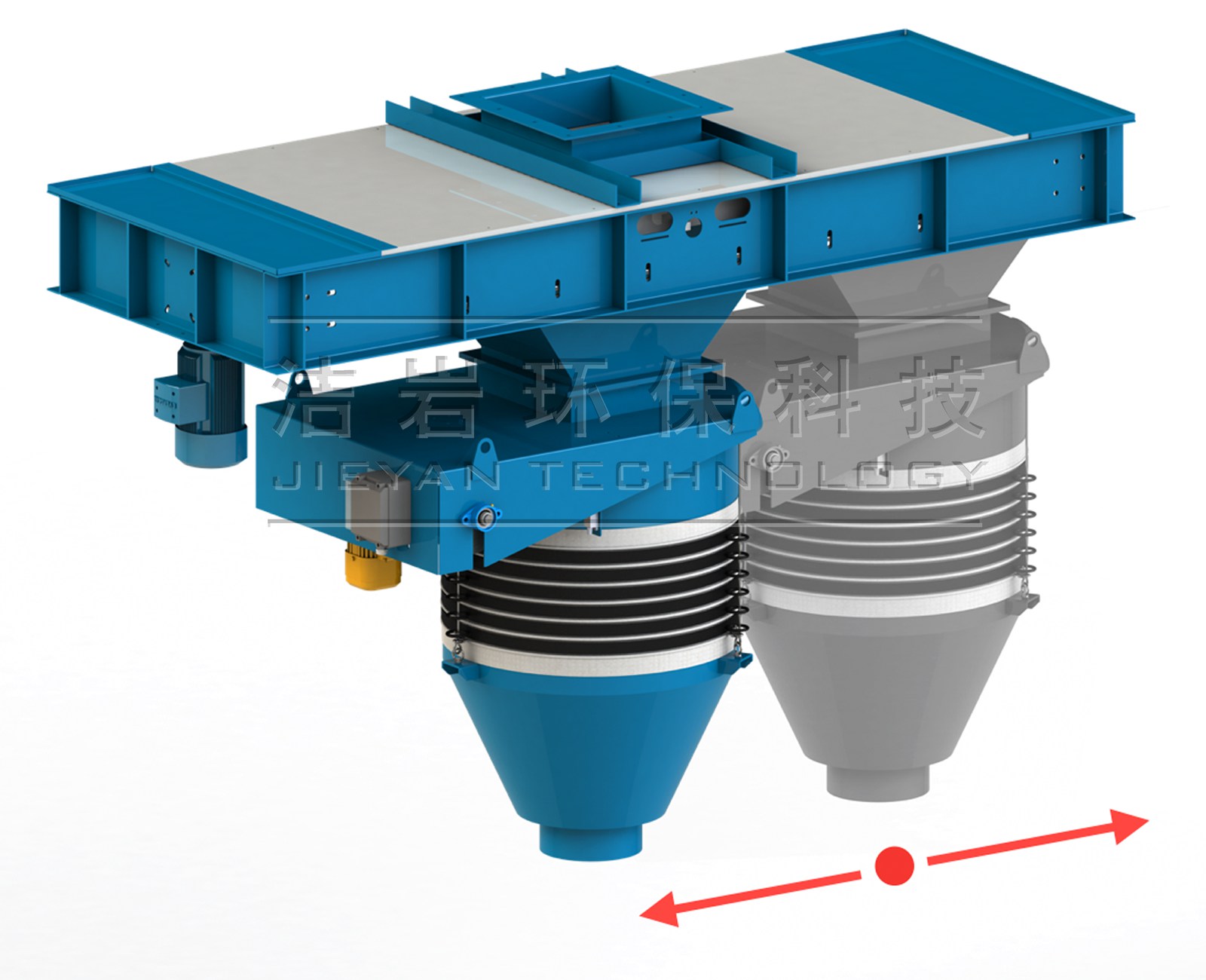
單軸移動定位器
| 設備型號 | 雙軸移動定位器 | 單軸移動定位器 | ||
| 智能視覺定位型 | 手動型 | 智能視覺定位型 | 手動型 | |
|---|---|---|---|---|
| 移動軸向 | 雙軸 | 雙軸 | 單軸 | 單軸 |
| 移動方向 | X軸雙向 & Y軸雙向 | X軸雙向 & Y軸雙向 | X軸雙向 | X軸雙向 |
| 移動幅度 | ±250mm | ±250mm | ±250mm | ±250mm |
| 電機類型 | 步進電機 | 普通電機 | 步進電機 | 普通電機 |
| 外形尺寸 | 2700mm*2700mm | 2700mm*2700mm | 1600mm*2700mm | 1600mm*2700mm |
*上述技術參數為理論參考數據,不同工況不同物料,理論通過量也會不同,請以銷售經理提供的技術方案或技術協議參數為準。